Abstract
We introduce the sequential multi-object robotic grasp sampling algorithm SeqGrasp that can robustly synthesize stable grasps on diverse objects using the robotic hand's partial Degrees of Freedom (DoF). We use SeqGrasp to construct the large-scale Allegro Hand sequential grasping dataset SeqDataset and use it for training the diffusion-based sequential grasp generator SeqDiffuser. We experimentally evaluate SeqGrasp and SeqDiffuser against the state-of-the-art non-sequential multi-object grasp generation method MultiGrasp in simulation and on a real robot. The experimental results demonstrate that SeqGrasp and SeqDiffuser reach an 8.71%-43.33% higher grasp success rate than MultiGrasp. Furthermore, SeqDiffuser is approximately 1000 times faster at generating grasps than SeqGrasp and MultiGrasp.
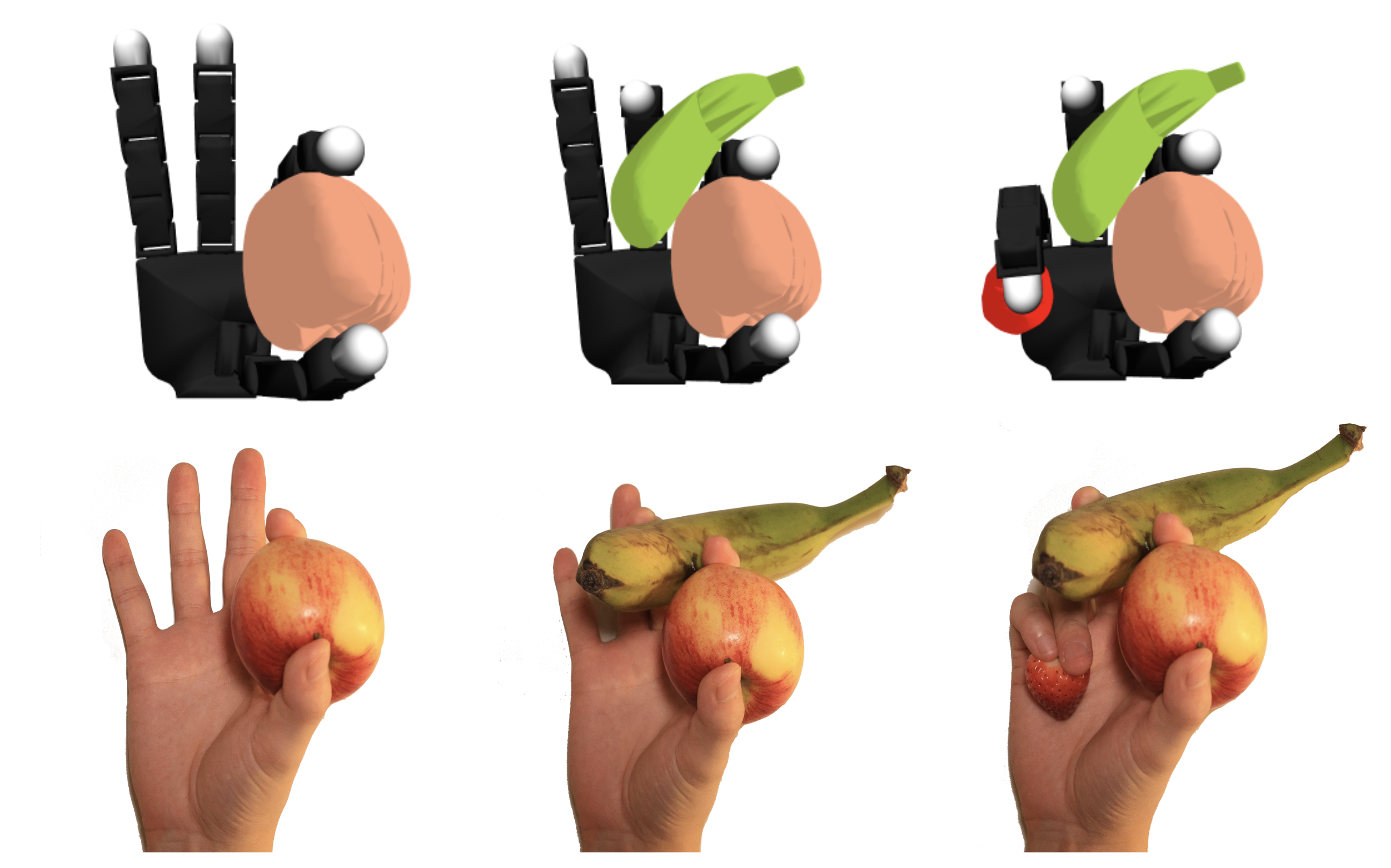
Generated Examples
We performed an ablation study over object size
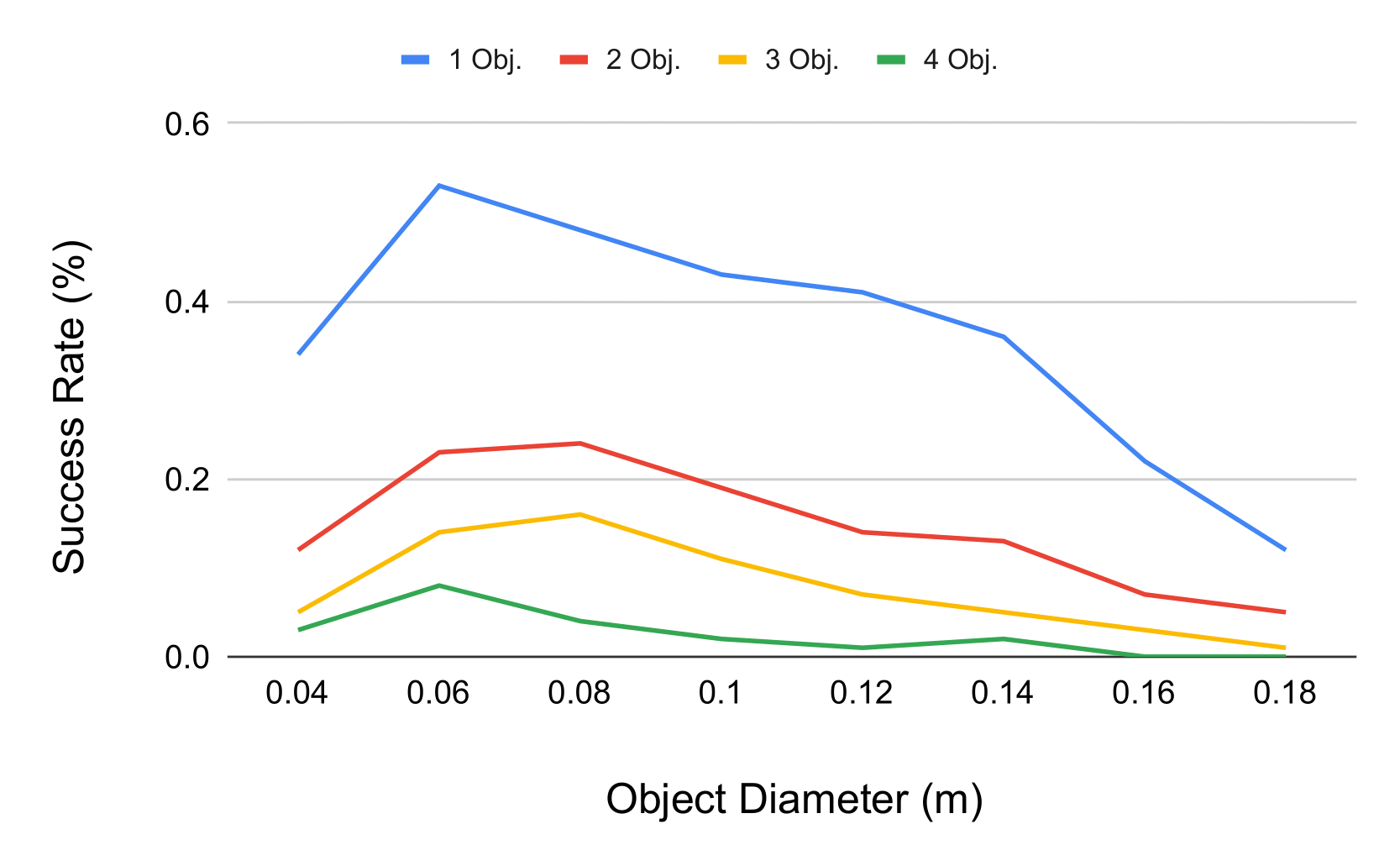
Grasping success is strongly influenced by both object size and the number of objects being grasped. Fewer and moderately sized objects (around 0.06-0.08m) maximize success, while larger diameters and higher object counts greatly reduce grasp effectiveness.
BibTeX
@ARTICLE{11177174,
author={Lu, Haofei and Dong, Yifei and Weng, Zehang and Pokorny, Florian T. and Lundell, Jens and Kragic, Danica},
journal={IEEE Robotics and Automation Letters},
title={Grasping a Handful: Sequential Multi-Object Dexterous Grasp Generation},
year={2025},
volume={10},
number={11},
pages={11880-11887},
keywords={Grasping;Hands;Robots;Shape;Thumb;Visualization;Vectors;Training;Silicon;Kinematics;Grasping;dexterous manipulation;data sets for robot learning},
doi={10.1109/LRA.2025.3614051}}
Acknowledgements
This work was supported by the Swedish Research Council, the Knut and Alice Wallenberg Foundation, the European Research Council (ERC-BIRD-884807). The authors also would like to express their sincere gratitude to Li Chen for valuable assistance with the experimental hardware and to Ning Zhou for contributing an RTX 3090 graphics card.
Contact
For questions and comments, please contact us.